Enhancing Object Position Estimation Under GNSS Outages Through Kalman Filter Integration
Keywords:
Kalman Filter, Global Navigation Satellite System, Object Tracking, Inertial Navigation System, State EstimationAbstract
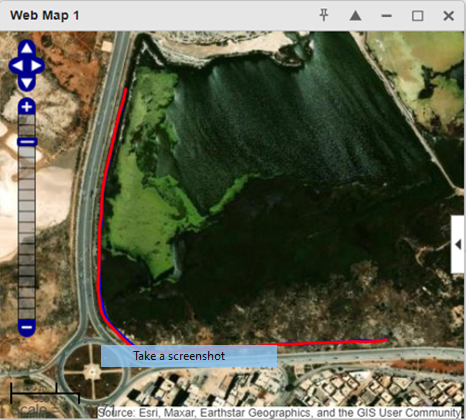
Determining the path and location of a person or vehicle using satellite navigation systems can be challenging or even impossible, particularly in areas where the satellite signal is weak or non-existent, such as inside tunnels and enclosed spaces. Consequently, tracking becomes difficult. To address this issue, a method has been researched to reduce the error rate in such locations: the Kalman Filter method. After implementing this approach, when the signal received from the satellites is strong, the application readings closely align with the satellite readings, making it applicable in areas where the satellite signal is either weak or nonexistent.
Dimensions
Published
05-12-2024
How to Cite
[1]
Mohamad Abdalla, “Enhancing Object Position Estimation Under GNSS Outages Through Kalman Filter Integration”, ijees, vol. 2, no. 4, pp. 12–18, Dec. 2024.
Issue
Section
Articles
Copyright & Licensing